書籍「ROSではじめる ロボットプログラミング」を一通り読み終わって、何となくロボットの自己位置認識の重要性を感じている。
ロボット自身の移動量を計測する手法全般を”Odometry“と言うらしい。
中でも1番簡単なやり方は、車輪などの駆動装置の回転数を加算して移動距離とみなす方法。これはWheel Odometryとか呼ばれるらしい。この手法は手軽だがもちろん欠点もあって、車輪が滑るなどして空転した分も移動量として加算されてしまう。そのため、Wheel Odometryではロボットが遠くへ移動するほど、どんどん誤差が溜まってしまう。
これに対して、カメラ画像を使って自己位置認識を行うのがVisual Odometry(VO)という分野。ロボットの自己位置認識では、ステレオカメラやDepthカメラといった3Dカメラを用いたVisual Odometryの手法がたくさんあるようだ。
以前見たコレは単眼カメラで撮影した2Dの画像を用いて自己位置を認識するMonocular Visual Odometry手法の1つ↓
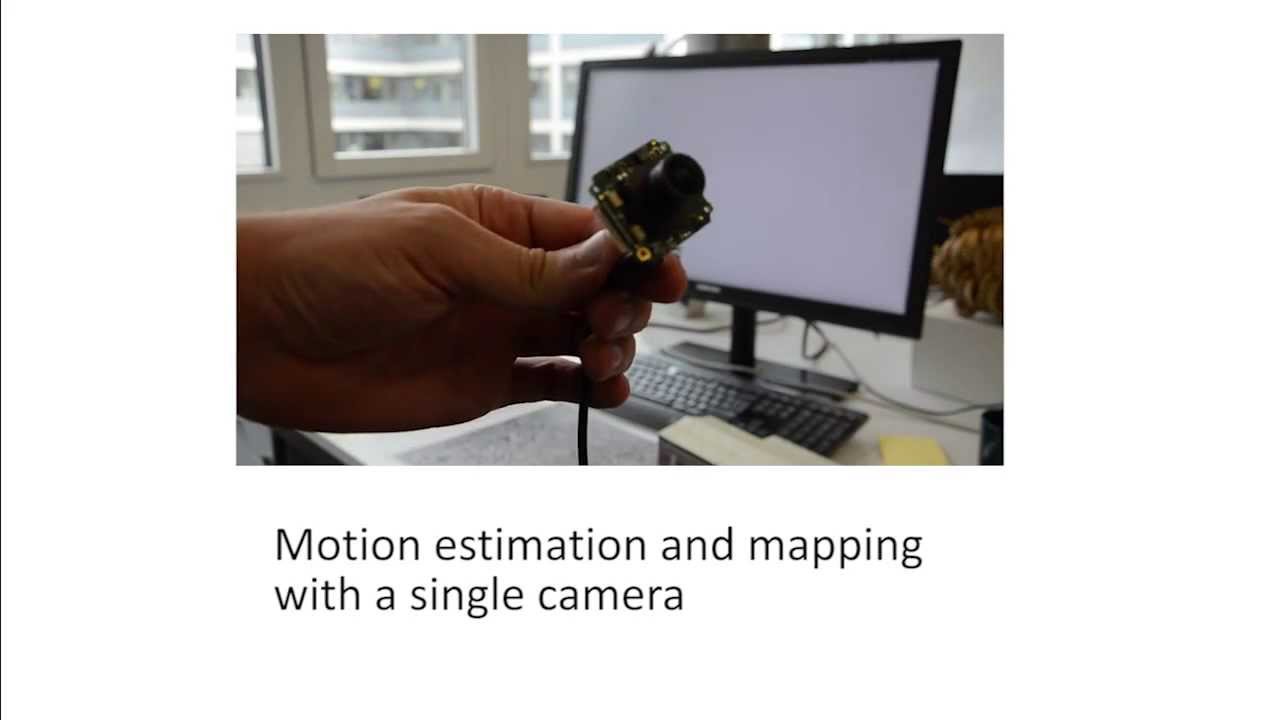
この技術のすごさがやっと分かってきた。
このSVO(Semi-Direct Monocular Visual Odometry)はROSで試せるようですよ↓
http://kivantium.hateblo.jp/entry/2014/07/01/000651
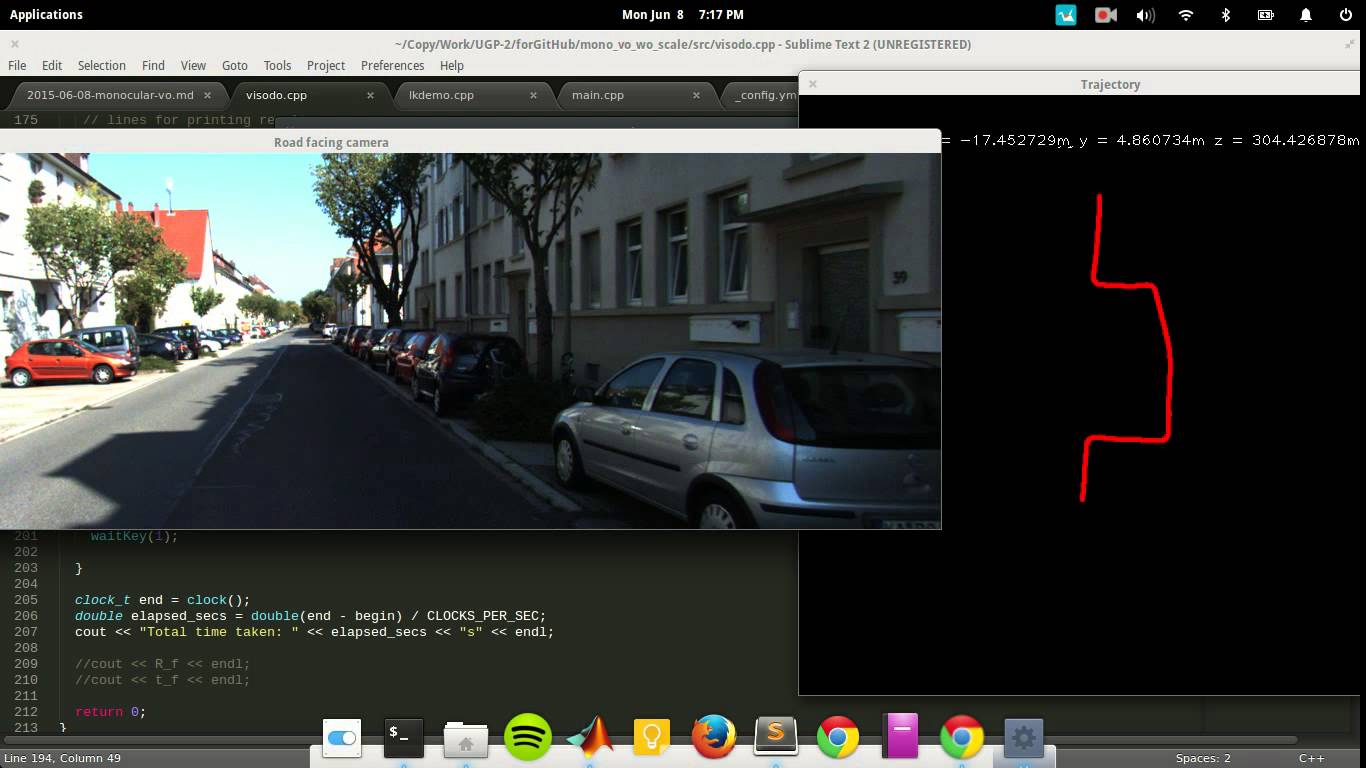
単眼カメラによるVisual Odometry技術に関するチュートリアル、およびOpenCVを使って実装したサンプルが公開されているのを知った↓
https://avisingh599.github.io/vision/visual-odometry-full/
https://avisingh599.github.io/vision/monocular-vo/
ソースコード(C++)はこちら↓
mono-vo
これは、OpenCV 3.0をベースにMonocular Visual Odometry手法(単眼カメラによる自己位置認識)を実装したものです。
アルゴリズム
基本行列の推定にNisterの5点アルゴリズムを使用し、トラッキングにはFAST特徴量とKanade-Lucas-Tomasi Feature Tracker(Lucas–Kanade法)を使用しています。
詳細はこちらのレポートとこちらのブログ記事をご覧ください。
注意事項:
このプロジェクトはまだ相対スケールの推定精度が低いです。そのため、スケール情報はKITTIデータセットのground truthファイルから取得しています。
見たところ、ソースコードはそれほど大規模じゃなさそうだけど、OpenCVを使うとそんなに簡単に書けちゃうものなのだろうか。
追記:中身を読んでみた↓
ここで出てくるKITTIデータセットというのは自動車ビジョン向けの大規模データセットらしいです↓
自動車ビジョン向けの新しい大規模データセット「KITTI Vision Benchmark Suite」
このVisual Odometry技術でロボットの移動量を正確に認識して、さらにその情報から地図を作成するところまで発展するとSLAMなんですかね。(良く解ってない)
2020年5月 追記:最近はPythonでVisual OdometryできるpySLAMというのがありますね↓
https://github.com/luigifreda/pyslam
2通りの再構成方法
カメラで撮影した連続画像(動画)から移動量を測るための再構成方法には大きく2通りあるらしい。
- indirect (feature-based):画像から特徴点を抽出し、疎(sparse)な情報のマッチングで再構成する
- direct:密(dense)な画素情報をそのまま使って再構成する
上記mono-voのコードは特徴点ベースだから、indirectな方法を実装しているということですね。
単眼カメラによるSLAMで有名なLSD-SLAMは、directな手法↓
http://vision.in.tum.de/research/vslam/lsdslam
LSD-SLAMのソースコードは公開されてはいるけど、まだ試せるほど知識がない。
追記:directな手法とindirectな手法を組み合わせたDirect Sparse Odometry(DSO)という手法があるらしい↓
https://vision.in.tum.de/research/vslam/dso
ソースコードもある↓
https://github.com/JakobEngel/dso
追記:第1回3D勉強会@関東でDSOについて解説されていました↓
関連記事
AnacondaとTensorFlowをインストールしてVi...
マルコフ連鎖モンテカルロ法
Verilog HDL
Unityで画面タッチ・ジェスチャ入力を扱う無料Asset『...
KelpNet:C#で使える可読性重視のディープラーニングラ...
3分の動画でプログラミングを学習できるサイト『ドットインスト...
Unityで強化学習できる『Unity ML-Agents』
Google App Engine上のWordPressでA...
オープンソースの物理ベースレンダラ『Mitsuba』をMay...
Multi-View Environment:複数画像から3...
Live CV:インタラクティブにComputer Visi...
MRenderUtil::raytrace
1枚の画像からマテリアルを作成できる無料ツール『Materi...
画像生成AI Stable Diffusionで遊ぶ
FreeMoCap Project:オープンソースのマーカー...
viser:Pythonで使える3D可視化ライブラリ
組み込み向けのWindows OS 『Windows Emb...
Human Generator:Blenderの人体生成アド...
網元AMIで作ったWordpressサイトのインスタンスをt...
RSSフィードを読込んで表示するWordpressプラグイン...
オーバーロードとオーバーライド
BlenderProc:Blenderで機械学習用の画像デー...
OpenCV 3.3.0 contribのsfmモジュールの...
Webサイトのワイヤーフレームが作成できるオンラインツール
光学式マウスのセンサーを応用すると…
ArUco:OpenCVベースのコンパクトなARライブラリ
Regard3D:オープンソースのStructure fro...
Unityで学ぶC#
Point Cloud Libraryに動画フォーマットが追...
UnityプロジェクトをGitHubで管理する
Javaで作られたオープンソースの3DCGレンダラ『Sunf...
携帯電話ロボット『RoBoHoN(ロボホン)』
UnityでOpenCVを使うには?
Rerun:マルチモーダルデータの可視化アプリとSDK
Unreal Engineの薄い本
動的なメモリの扱い
OpenMVS:Multi-View Stereoによる3次...
Polyscope:3Dデータ操作用GUIライブラリ
OpenCVの三角測量関数『cv::triangulatep...
ブログをGoogle App EngineからAmazon ...
ManuelBastioniLAB:人体モデリングできるBl...
Raspberry PiでIoTごっこ


コメント
[…] monocular-visual-odometry-using-opencv [OpenCV][カメラ] […]
[…] OpenCVでカメラ画像から自己位置認識 (Visual Odometry) […]