 Computer Vision
Computer Vision hloc:SuperGlueで精度を向上させたSfM・Visual Localization
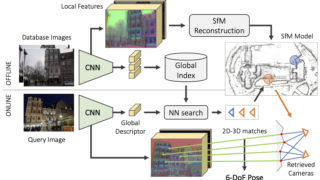
SfM(Structure from Motion)系の話題。機械学習で特徴点マッチングの精度を向上させたSuperGlueをSfMに利用した実装が公開されている↓hloc - the hierarchical localization t...
Computer Vision  C++
C++  Programming
Programming  CG
CG  Computer Vision
Computer Vision  C++
C++  Computer Vision
Computer Vision  AR
AR