
ライブラリではなく、ちゃんとGUIを備えたオープンソースのStructure from Motionのアプリケーションを見つけた。
このRegard3DのソースコードはMIT licenseだそうだ。
Regard3D
Regard3Dは、無料でオープンソースのStructure from Motionツールです。
Regard3Dは、被写体を別々のアングルで撮影した複数枚の写真から、被写体の3Dモデルを生成します。
特長:
- マルチプラットフォーム対応(Windows, OSX, Linux)
- 強力なサードパーティツールとライブラリがベース
- 完全無料でオープンソース
動作環境:
- 64ビットのOS (Windows, Mac, Linux)
- OpenGL対応のグラフィックスカード/チップ
- 高解像度の画像を扱う場合はメモリ8GB以上を推奨
この手のGUIアプリケーションだとVisualSFMの方が有名ではありますが↓
【解説記事】写真からの3次元背景MOD作成の解説記事を書いてみました
記事本体: https://t.co/jPi1cyVZDJ
サンプル素材: https://t.co/nd0KUC01O8#カスタムメイド3D2 #CM3D2 pic.twitter.com/upC5oAtQhp— ノーベルチョコ (@nobelchoco) 2016年8月14日
公式のイントロダクションによると、Regard3DではAKAZE特徴を使い、LIOP (Local Intensity Order Pattern)という方法で画像間のマッチングを行うとか。
Regard3DのソースコードはGitHub上にある↓
https://github.com/rhiestan/Regard3D
で、まあ、中身ではopenMVGを使っているみたい。
![]()
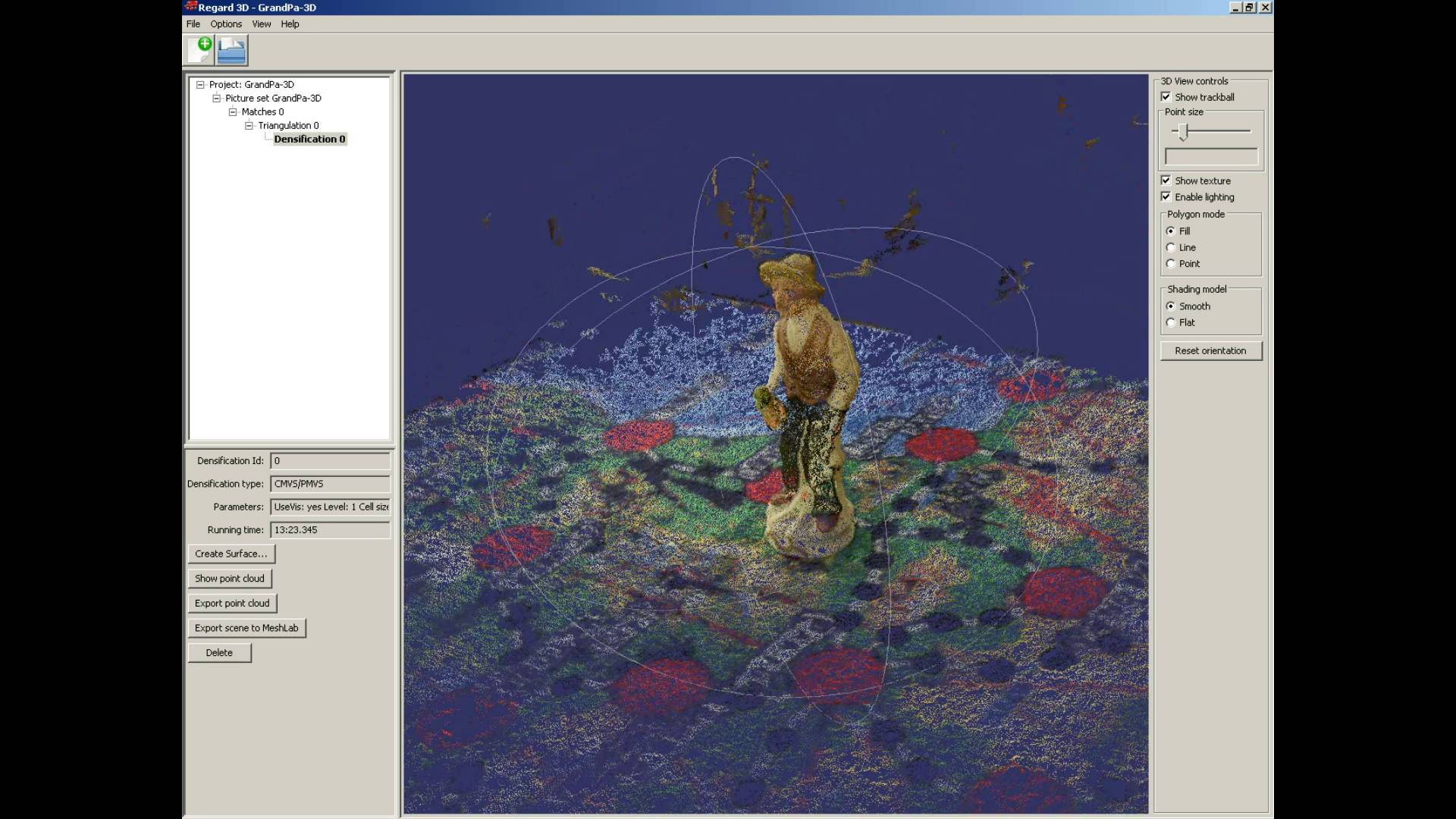
openMVGの機能をGUIで手軽に使えるようにしたようなツールだが、疎な点群の復元だけでなく、密な点群の復元”densification“を行う機能も備わっている。密な点群の復元には以下2通りの方法を選べる。中でこれらのツールを呼び出してるってことかな。
- CMVS/PMVS by 古川泰隆 (Clustering Views for Multi-view Stereo (CMVS))
- MVE (Multi-View Environment) by Michael Goesele, Simon Fuhrmann and others (Multi-View Environment)
Exifからカメラ情報を取得する関係で、入力画像のフォーマットはJPEGオンリー。また、撮影に使用したカメラ(の内部パラメータ)がデータベースに登録されていないと三角測量の処理でエラーになってしまう。(無いなら無いでデフォルト値を使うとかしてくれても良いのに…)
手持ちのiPhone6Sで撮った画像では上手く行かなかった。
追記:Regard3Dのデータベースにカメラ情報を追加する方法があった。公式サイトのPicture Setのページに書いてあった。
もし、あなたのお使いのカメラが不明(“
Sensor width“カラムに”N/A“と表示され、”not available“)な場合は、以下のステップを行ってください:
- お使いのカメラの正確モデルを特定(例えば、カメラメーカー、カメラモデル等の情報)し、インターネットでそのカメラの特性について調べ、カメラのセンサー幅を決定します。
- Unixの改行コードに対応したテキストエディタ(Notepad++など)で”
sensor_database.csv“ファイルを開きます。ファイルは、Windows環境なら
C:\Users\[User name]\AppData\Local\Regard3D
OS X環境ならRegard3Dのインストールディレクトリ(ほとんどの場合/Applications/Regard3D.app/Contents/Resources)にあります。- ファイルの”
Camera maker“列と”Camera model“列、そしてセンサーの幅をmm単位で入力し、”;“で区切ります。
記入例:Nikon;Nikon D5500;23.5- ファイルを保存してエディタを終了し、Regard3Dを再起動します。
このファイルについてのより詳しい情報はこちらをご覧ください。
https://github.com/openMVG/CameraSensorSizeDatabase
Regard3Dの形式(つまりopenMVG形式)のカメラセンサーデータCSVのリポジトリがGitHubにある↓
https://github.com/openMVG/CameraSensorSizeDatabase
最新バージョンのsensor_database.csvにiPhone6までは入ってた。

コメント