



この流れで、シフトカーを自律走行化させるため、障害物を避けて自律走行できるチョロQ「Q-eyes」を、シフトカーに組み込むことを前提に分解してみることにした。失敗したらしたで笑って済まそうと思う。
とりあえずガシャポンのシフトカーを分解してQ-eyesと並べてみると、何となく中に納まりそうなサイズ感。

Q-eyesのボディを外す。裏面前輪側にあるネジを1本外せば、後部のツメを外すだけ。なんだけど、中々外れなくて力で無理やり外した。

フロントに2つの赤外線センサーが付いていて、障害物を検知できる。
裏から見ると、1番後ろに小さいモーターが付いているのが見える。

1番気になるステアリング部分を外してみると、中にコイルが入っているのが分かる。つまり、電磁石の力でステアリングを動かしているということか。触ってみると分かるけど、ステアリング部分はかなり緩くできていて、ちょっとの力でも稼働できるようになっている。その分普段もグラグラしてる。
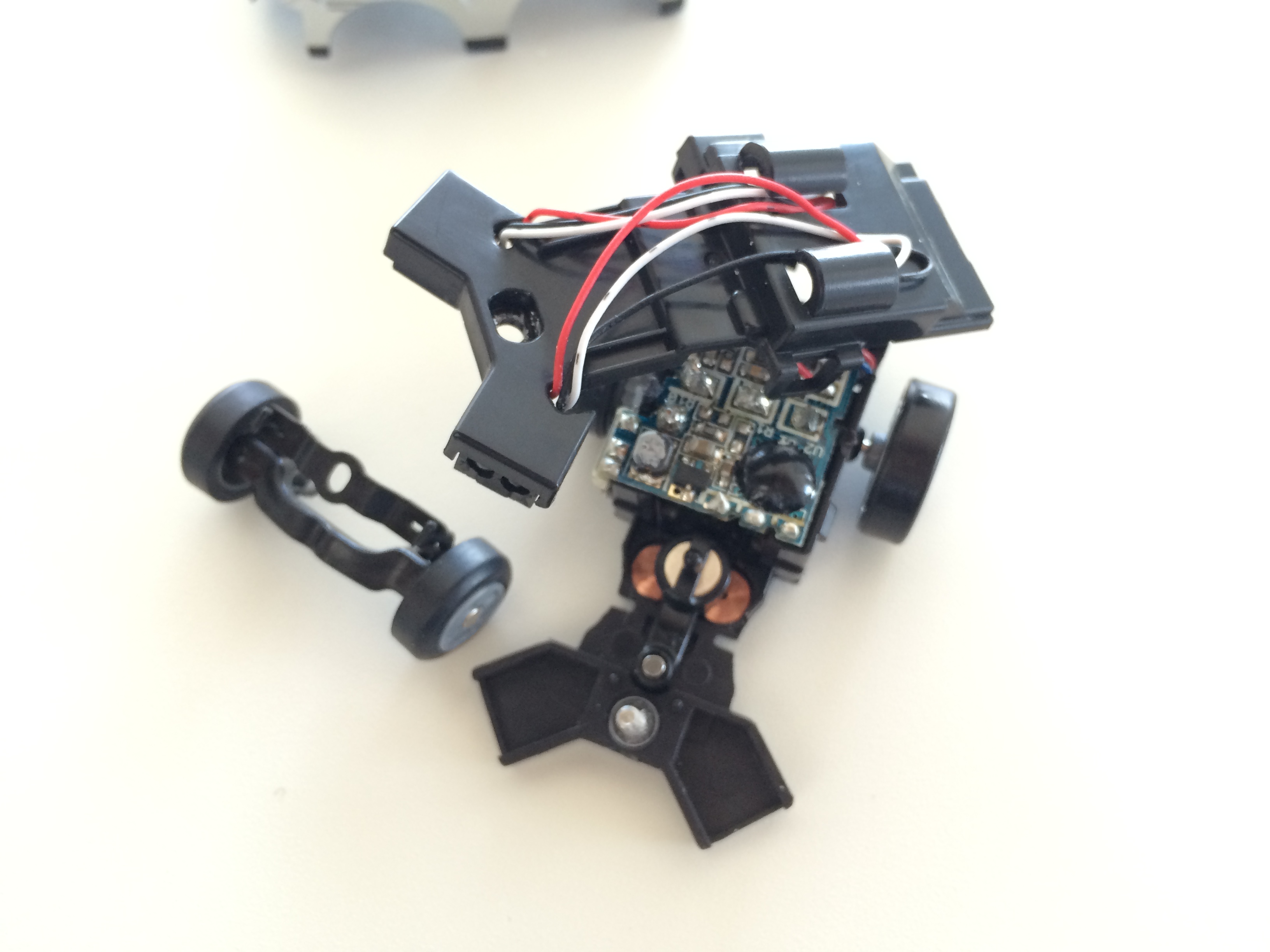
触ってみた感じだと、全体的にすごく小さい力でも動かせるように可動部分はかなり軽くできている。だからいわゆる乾電池を積まなくても動かせるんだろうね。これって、シフトカーのガワを被せちゃったら重くて動かないのでは…
上手いこと赤外線センサー部分をシフトカーのフロントに取り付けたい。シフトカー側をちょっと削るかなぁ。

センサーとステアリングだけ流用して、モーターは別のを考えるのもアリかもな。別途マイコンがいるか?




スポンサーリンク