本来なら例の書籍を読み進めて少しずつ理解していくつもりだったけど、しんどい。。。
書籍はなかなか読み進められなかったので、飛ばし読みしてプログラムを動かしながら徐々にディティールを理解していく方針へ切り替えた(笑)
何度か格闘するも上手くいかないOpenCVのsfmモジュールのビルドもいったん諦めて、もっとプリミティブな関数をいじってお勉強しようと思う。
以前見つけたこちらのチュートリアルのサンプルコードでfindEssentialMat関数、つまりNist´erの5点アルゴリズムをいじってみる。
このサンプルコードはヘッダーファイルを含めても300行未満なので読みやすいはず。
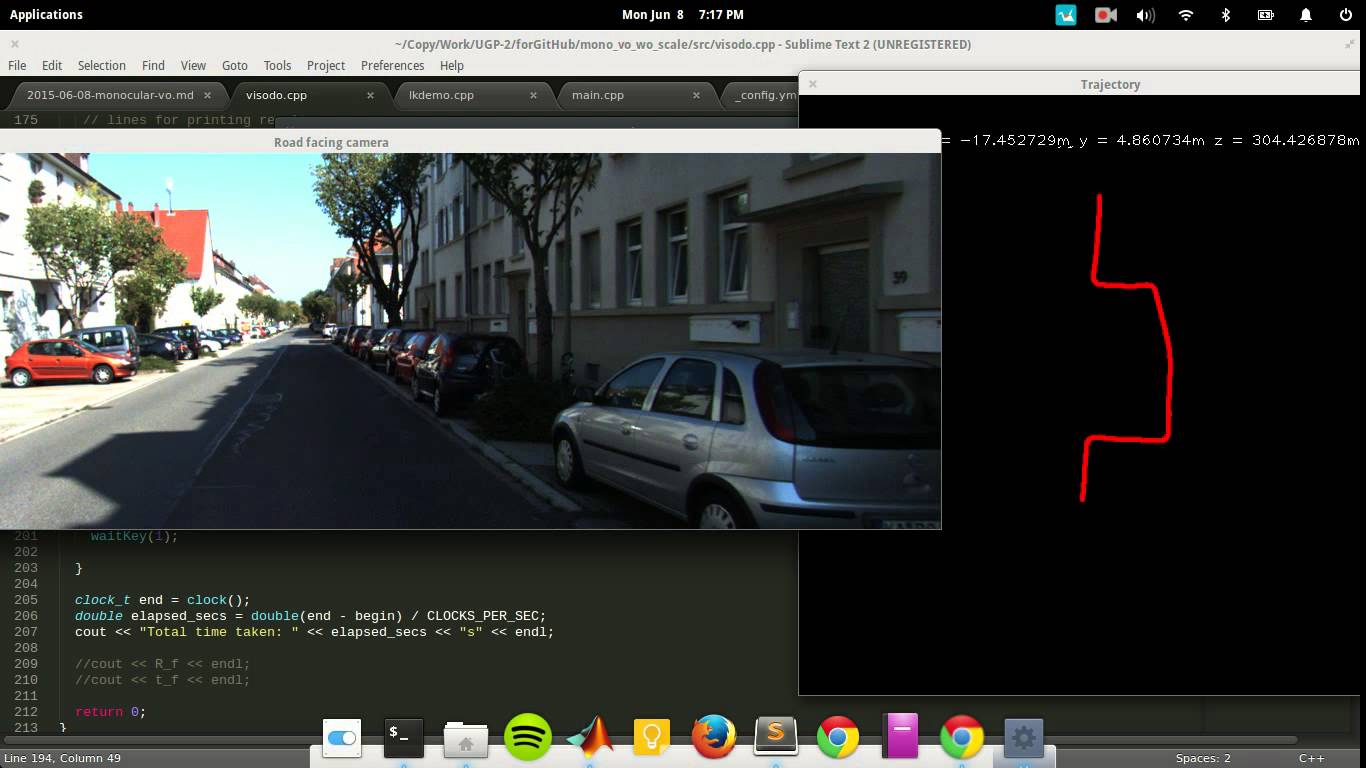
https://github.com/avisingh599/mono-vo
このリポジトリのmono-vo/src/visodo.cppを読んでみる。
というか、まずはこのブログ記事を読むところからかな。
http://avisingh599.github.io/vision/monocular-vo/
ブログ記事の一部を雑に日本語訳。
課題設定 (Formulation of the problem)
Input
カメラから取得したグレイスケールのストリーム画像を入力とし、時刻
, 時刻
の時点で取得した画像をそれぞれ
,
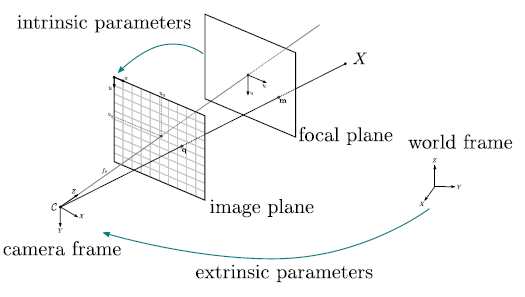
と呼びます。カメラの固有パラメータは事前にキャリブレーションによって取得済みです。キャリブレーションはOpenCVでも行うことができます。
Output
全ての画像ペアで、2枚の画像間の車両の移動を表す回転行列
と並進ベクトル
アルゴリズムの概要 (Algorithm Outline)
- 画像ペア:
- 上記画像の歪みを補正する。
- Nisterの5点アルゴリズム(with RANSAC)によってEssential Matrix(基本行列)を算出する。
- 上記ステップで求めたEssential Matrix(基本行列)から
- スピードメーター等の外部ソースからスケール情報を取得し、並進ベクトル
ということで、詳しく知りたいのは特に4と5の基本行列を求めてそれを回転行列
サンプルコードで言うとほんの一部。116~119行目の辺りですね↓
//recovering the pose and the essential matrix Mat E, R, t, mask; E = findEssentialMat(points2, points1, focal, pp, RANSAC, 0.999, 1.0, mask); recoverPose(E, points2, points1, R, t, focal, pp, mask);
findEssentialMatで求めた基本行列を回転行列と並進ベクトルへ分解する関数は上記のrecoverPoseだけじゃなく、decomposeEssentialMatというのも用意されてるんだが、decomposeEssentialMatでは特異値分解で2種類の
唯一の解を求めたい場合はrecoverPoseに対応点の情報を渡して使う。
ちなみに、findEssentialMat関数の中身のコードはこちら→modules/calib3d/src/five-point.cpp
five-point(5点アルゴリズム)ってファイル名なのね。
さて、オイラが何でこんなにしつこく勉強しているかというと、画像認識技術を測量ツールとして使いたかったりするのです。
http://pukulab.blog.fc2.com/blog-entry-42.html
http://pukulab.blog.fc2.com/blog-entry-44.html
5点アルゴリズムで推奨されるのは、5点の内の3点が同一平面状にあり、残り2点が任意の位置にあるような条件らしい。
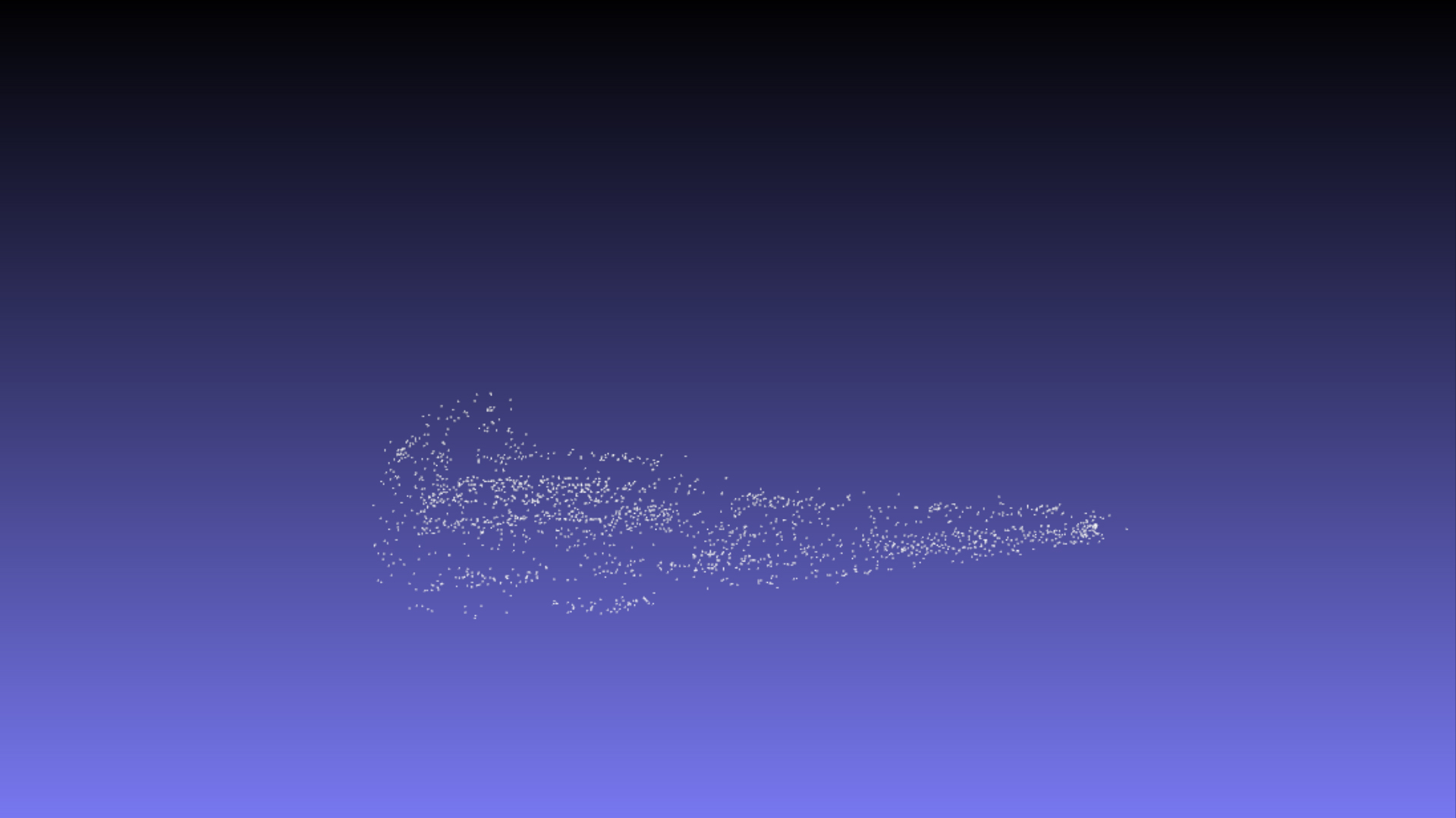
追記:その後、OpenCVの三角測量関数 cv::triangulatepointsもいじってみた↓
関連記事
ブログの復旧が難航してた話
MVStudio:オープンソースのPhotogrammetr...
iOSで使えるJetpac社の物体認識SDK『DeepBel...
Kubric:機械学習用アノテーション付き動画生成パイプライ...
参考書
YOLO (You Only Look Once):ディープ...
Accord.NET Framework:C#で使える機械学...
C++ 標準テンプレートライブラリ (STL)
KelpNet:C#で使える可読性重視のディープラーニングラ...
映画『ジュラシック・ワールド/新たなる支配者』を観た
オープンソースの物理ベースレンダラ『Mitsuba』をMay...
Verilog HDL
AMIMOTO(PVM版)で作成したインスタンスをAMIMO...
Unityで強化学習できる『Unity ML-Agents』
Russian3DScannerのトポロジー転送ツール『Wr...
TensorSpace.js:ニューラルネットワークの構造を...
PyMC:Pythonのベイズ統計ライブラリ
ブログが1日ダウンしてました
konashiのサンプルコードを動かしてみた
SSD (Single Shot Multibox Dete...
OpenCVでiPhone6sのカメラをキャリブレーションす...
Dlib:C++の機械学習ライブラリ
GeoGebra:無料で使える数学アプリ
ZScript
網元AMIで作ったWordpressサイトのインスタンスをt...
HerokuでMEAN stack
WordPressの表示を高速化する
Mean Stack開発の最初の一歩
オープンソースの顔認識フレームワーク『OpenBR』
Point Cloud Libraryに動画フォーマットが追...
Qlone:スマホのカメラで3Dスキャンできるアプリ
Mechanizeで要認証Webサイトをスクレイピング
書籍『ゼロから作るDeep Learning』で自分なりに学...
iPhone x ロボットハッカソン~RomoのiPhone...
cvui:OpenCVのための軽量GUIライブラリ
マルコフ連鎖モンテカルロ法
Iterator
疑似3D写真が撮れるiPhoneアプリ『Seene』がアップ...
映画『アバター:ウェイ・オブ・ウォーター』を観た
UnrealCV:コンピュータビジョン研究のためのUnrea...
タマムシっぽい質感
ブログのデザイン変えました


コメント