


GoogleがSLAM(Simultaneous Localization and Mapping)のオープンソースライブラリCartographerを発表した。
Apache(v2)ライセンスなので、ライセンスと著作権、変更点を表示すれば商用利用もできる。
Cartographer
Cartographerは、リアルタイムの自己位置推定と、複数プラットフォーム・センサー間での2Dと3Dマッピング(SLAM)を提供するシステムです。
http://shiropen.com/2016/10/06/20203
SLAM(Simultaneous Localization and Mapping)ってのは、日本語で言うと「自己位置推定と環境地図作成」ですかね。
ソースコードはGitHub上にあり、ドキュメントはこちらにある。↓
https://google-cartographer.readthedocs.io/
スポンサーリンク
推奨動作環境
Cartographerは他の環境でも動作しますが、以下の構成での動作を確認しております:
- 64-bit, modern CPU (例:core i7 第3世代)
- 16 GB RAM
- Ubuntu 14.04 (Trusty)
- gcc version 4.8.4
ROS(Robot Operating System)用のAPIも用意されており、有名なToyota HSR、TurtleBotsについてはもう対応したコードが公開されているようだ。↓
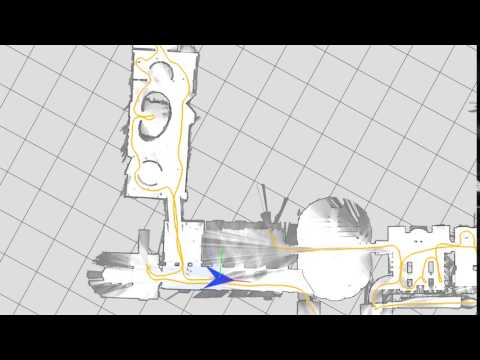
Cartographerの3D SLAMのデモ動画↓

Qiitaに失敗談だけは上がっている(笑)
http://qiita.com/syoamakase/items/ea3ad5040cd53507ca5e
ROS自体もマルチプラットフォーム対応のバージョン2.0の準備が進んでますが、これからロボット制御ソフトウェアの開発はどんどんお手軽になっていくんですかね。
https://github.com/ros2
スポンサーリンク