

SSII(Symposium on Sensing via Image Information) 2015が始まりました。なんだかんだで、オイラはSSIIの聴講が3回目になる。今回も、1日目は大変有難いチュートリアル講演会だった。
SSII2015 チュートリアル講演会
ハッシングによる効率的な大規模画像検索
-近似近傍探索の新たなスタンダード-講師:入江豪氏(NTT)
Deep Learningによる画像認識革命-歴史・最新理論から実践応用までー
講師:中山英樹氏(東京大学)
特徴点追跡による動画像からの逐次3次元復元とその応用-座標系の基礎から応用事例・最新研究動向まで-
講師:佐藤智和氏(奈良先端科学技術大学院大学)
コンピュータビジョンの最新ソフトウェア開発環境-OpenCV,PCLの導入・機能紹介。プログラミング言語の選択と開発ツールの活用-
講師:林昌希氏(慶應義塾大学)
個人的に1番興味があったのは「特徴点追跡による動画像からの逐次3次元復元とその応用」、つまりvisual-SLAMの話。Structure From Motionが「オフラインで時間をかけて精度の高い3次元復元を行う」のに対して、SLAMは「リアルタイムでそこそこの3次元情報を復元する」という位置づけらしい。
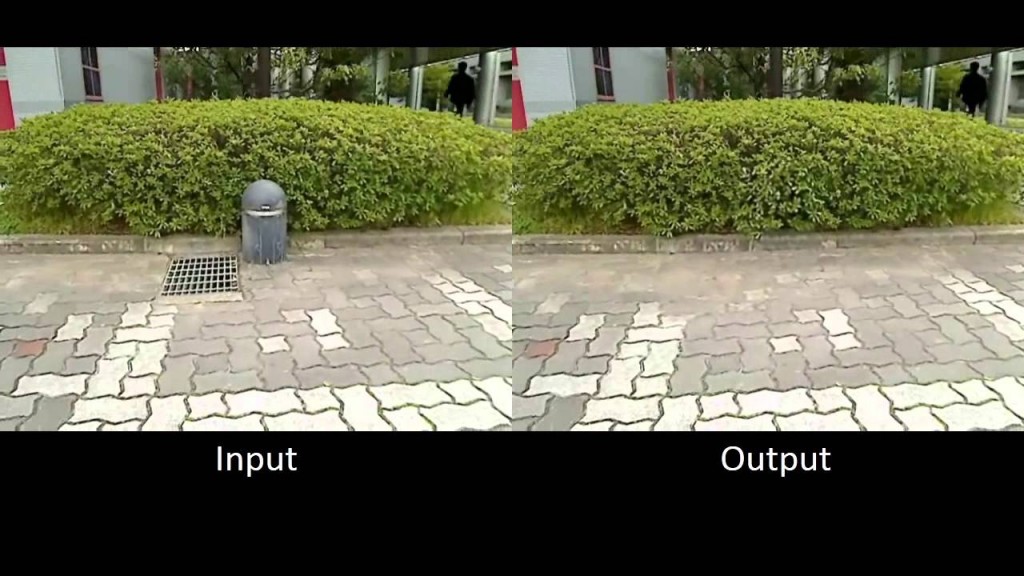
このセッションの中で仮想物体を現実の風景に重畳する「拡張現実感」(AR:Augmented Reality)に対して、現実の風景から仮想的に実在する物体を消して見せる「隠消現実感」(DR:Diminished Reality)という概念があることを初めて知った。
こちらはリアルタイムに実物体を除去するデモ。↓
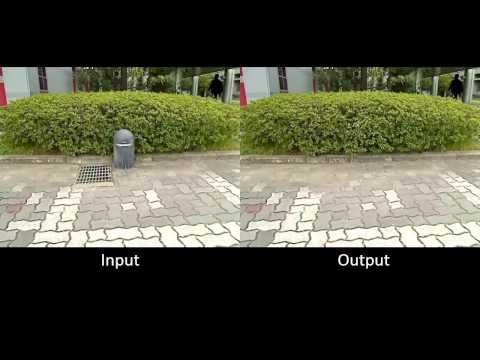
こういうのって、リアルタイムにできちゃうもんなのね。
v-SLAM系の話を聞いていると、オープンソースで相当色んなことができる時代であることを実感する。
そしてそして、DERiVE コンピュータビジョン ブログ & メルマガやポイントクラウドコンソーシアムでお馴染みの最後のセッションで印象的だったのが後半のプログラミング言語と研究開発環境の話。1度会社員としてソフトウェア開発に従事した経験を持つ林さんならではの問題提起だなぁ、と。
オイラも似たような悩みというか、バランスをどう取るべきか試行錯誤中。以前も書いたけど、会社員としてソフトウェア開発のプロトタイピングをする時には、あんまりオレオレコード全開で突き進むと後々困るけど、キッチリ設計に時間をかけ過ぎても良くない。自分の頭は帰納的か、演繹的かどちらの傾向が強いだろうか。
スポンサーリンク

ところで、前々から思ってたんだけど、林さんってヤムチャ(というか古谷徹)の声真似上手そう。(どうでもいい)
会場では書籍「ディジタル画像処理」と「コンピュータグラフィックス」の改訂版がそれぞれ17%, 15%割引で販売されていた。内容が大幅に改定・追加されている様子。




スポンサーリンク