


.NETアプリケーション(特にUnity)からROSを利用するためのC#でできたライブラリ・ツール ROS#が公開された。→ROS-INDUSTRIALのアナウンス
ライセンスは Apache 2.0で、freeで商用利用も可能。
ROS#


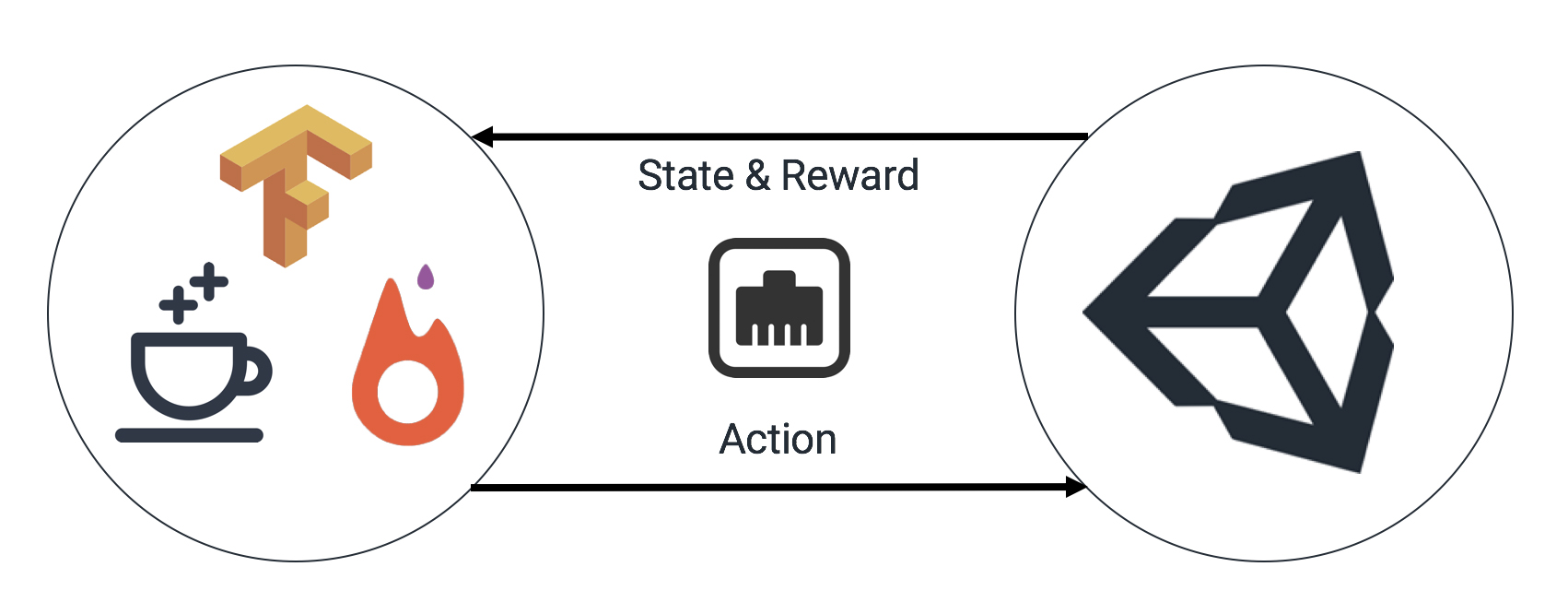
ROS#は、.NETアプリケーション、特にUnityからROSと通信するためのC#のオープンソースライブラリとツールのセットです。
ROS#の使用例はこちらをご覧ください。
スポンサーリンク
Unityが主なターゲットになってる!ちゃんとunitypackageがありますよ。
ここ最近、ゲームエンジンがどんどん工学系の研究開発ツールとして拡張されていってる感じがする。
もともとGazeboシミュレーターやROSのrvizパッケージなんかはUnityで置き換えたい感あったしね。(最近はこういうのDigital Twinって言うんですかね?)
対応するROSのバージョンはROS Kineticらしい。(ROS2じゃないのね)
Unityのサンプルプロジェクト↓
https://github.com/siemens/ros-sharp/tree/master/Unity3D
使い方のWiki↓
https://github.com/siemens/ros-sharp/wiki
UnityはWindows上で動かし、VM上のUbuntuでroscoreを動かすようだ。



シミュレーション環境として最近のゲームエンジンって優秀だもんね。ゲームエンジンをエコシステムとして取り込んだ方が効率が良いはず。

追記:すでに試されている方もいます↓
https://kato-robotics.hatenablog.com/entry/2018/10/30/170446
https://kuwamai.hatenablog.com/entry/2018/11/28/200011
2018年6月26日 追記:HoloLens対応のサンプルを公開した方がいらっしゃいます↓
https://github.com/tarukosu/ros-sharp/tree/support-for-uwp/Unity3D
https://tarukosu.hatenablog.com/entry/RosSharpUWP
最近オイラはROSからだいぶ遠ざかってはいるのですが。。。

追記:ROS#もv1.3になってUnity2018.2.6以降に対応とのこと。
http://kuwamai.hatenablog.com/entry/2018/11/28/200011



スポンサーリンク