SfM(Structure from Motion)系の話題。
機械学習で特徴点マッチングの精度を向上させたSuperGlueをSfMに利用した実装が公開されている↓
hloc – the hierarchical localization toolbox
hlocは、state-of-the-artな6-DoF visual localization用モジュラーツールボックスです。
hlocはHierarchical Localizationや画像の検索の活用、特徴マッチングを実装しており、高速・正確でスケーラブルです。
このコードベースは、CVPR 2020の屋内/屋外のlocalization challengeで優勝しました。SuperGlueとは特徴マッチングのためのグラフニューラルネットワークです。
hlocを使えば、以下のことが可能です:
- CVPR 2020の優勝結果を屋外(Aachen)、屋内(InLoc)データセットで再現
- 独自のデータセットでSuperPoint + SuperGlueのStructure-from-Motionを実行してローカライズ
- 独自のデータをvisual localizationするために局所特徴量や画像検索について評価
- 新しいローカリゼーションのパイプラインを実装し、手軽にデバッグする 🔥
Hierachical Localizationには、画像検索と特徴マッチングの両方を使用します。
Installationを見ると、PyTorchとCOLMAPのPythonバインディングpycolmapを使うらしい。
つまりどういうプロセスで動くのか、General pipelineを読んでみる↓
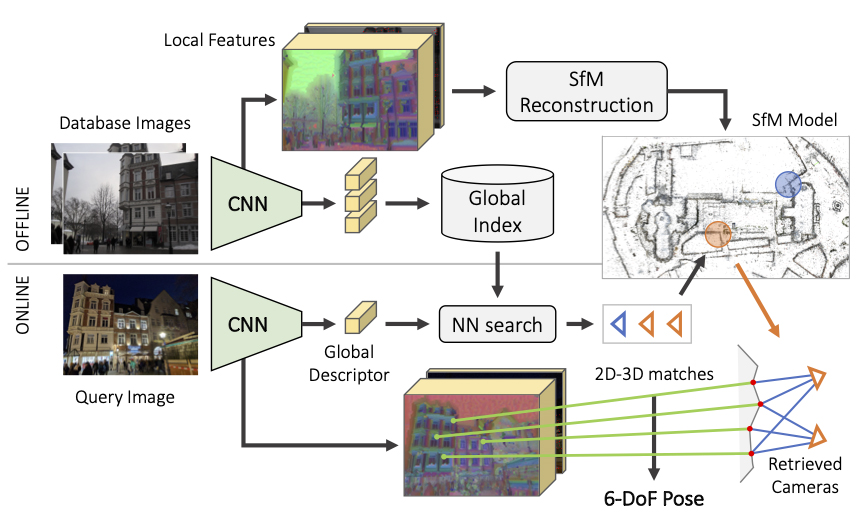
General pipeline
hlocは複数のscriptで構成されており、大まかに以下のステップの処理を行います:
- データセット、クエリ画像全てのSuperPoint局所特徴量を抽出する
- リファレンス用の3D SfMモデルを構築する
- 検索または以前のSfMモデルを使用し、データベース画像の対応関係を見つける
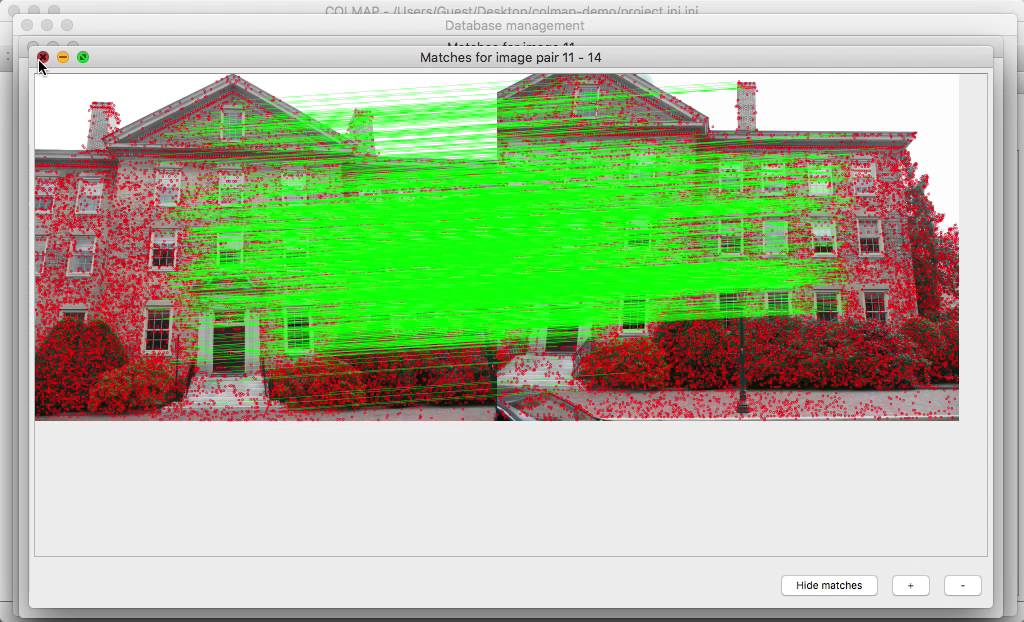
- SuperGlueでデータベースのペアをマッチングさせる
- COLMAPを使用して新しいSfMモデルを三角測量する
- 検索によって、各クエリに関連するデータベース画像を見つける
- SuperGlueでクエリ画像をマッチングさせる
- ローカリゼーションを実行する
- 可視化とデバッグ
ローカリゼーション処理については、visuallocalization.netのデータセットで評価できます。屋内データセットInLocなどの3D Lidarスキャンが利用可能な場合、手順2.はスキップできます。
hlocのアーキテクチャ:
hloc/*.py:最上位階層(top-level)のscripthloc/extractors/:特徴抽出のインターフェイスhloc/matchers/:特徴マッチングのインターフェイス
SuperGlueは第三回 全日本コンピュータビジョン勉強会(前編)で@yu4uこと内田祐介さんが発表してたやつだ。
SuperGlue
CVPR 2020網羅的サーベイのSuperGlueのページ↓
http://xpaperchallenge.org/cv/survey/cvpr2020_summaries/338
まだGNN(Graph Neural Network)について知識不足…
関連記事
MB-Lab:Blenderの人体モデリングアドオン
AfterEffectsプラグイン開発
iPhone x ロボットハッカソン~RomoのiPhone...
Live CV:インタラクティブにComputer Visi...
OpenCVのfindEssentialMat関数を使ったサ...
機械学習で遊ぶ
Polyscope:3Dデータ操作用GUIライブラリ
iOSデバイスのためのフィジカル・コンピューティングツールキ...
動的なメモリの扱い
Deep Learningとその他の機械学習手法の性能比較
ROSの薄い本
UnrealCLR:Unreal Engineで.NET C...
OpenCVの超解像(SuperResolution)モジュ...
第1回 3D勉強会@関東『SLAMチュートリアル大会』
OpenCV 3.1から追加されたSfMモジュール
Zibra Liquids:Unity向け流体シミュレーショ...
konashiのサンプルコードを動かしてみた
ZBrushのZScript入門
書籍『仕事ではじめる機械学習』を読みました
『手を動かしながら学ぶエンジニアのためのデータサイエンス』ハ...
OpenVDB:3Dボリュームデータ処理ライブラリ
Unreal Engineの薄い本
JavaScriptとかWebGLとかCanvasとか
OpenCVで動画の手ぶれ補正
ブログの復旧が難航してた話
OpenCV
PythonのHTML・XMLパーサー『BeautifulS...
ベイズ推定とグラフィカルモデル
Unity MonoBehaviourクラスのオーバーライド...
オープンソースの取引プラットフォーム
HD画質の無駄遣い
NeRF (Neural Radiance Fields):...
ROSでガンダムを動かす
Google Chromecast
TensorFlowでCGを微分できる『TensorFlow...
Blendify:コンピュータービジョン向けBlenderラ...
Mayaのプラグイン開発
html5のcanvasの可能性
Google App EngineでWordPress
Digital Emily Project:人間の顔をそっく...
Kubric:機械学習用アノテーション付き動画生成パイプライ...
SSD (Single Shot Multibox Dete...

コメント