Structure from MotionからMulti-View StereoまでできるCOLMAPというツールを見つけた。そこからさらにSurface ReconstructionまでやらないとPhotogrammetryとは言わないのかね。
COLMAP
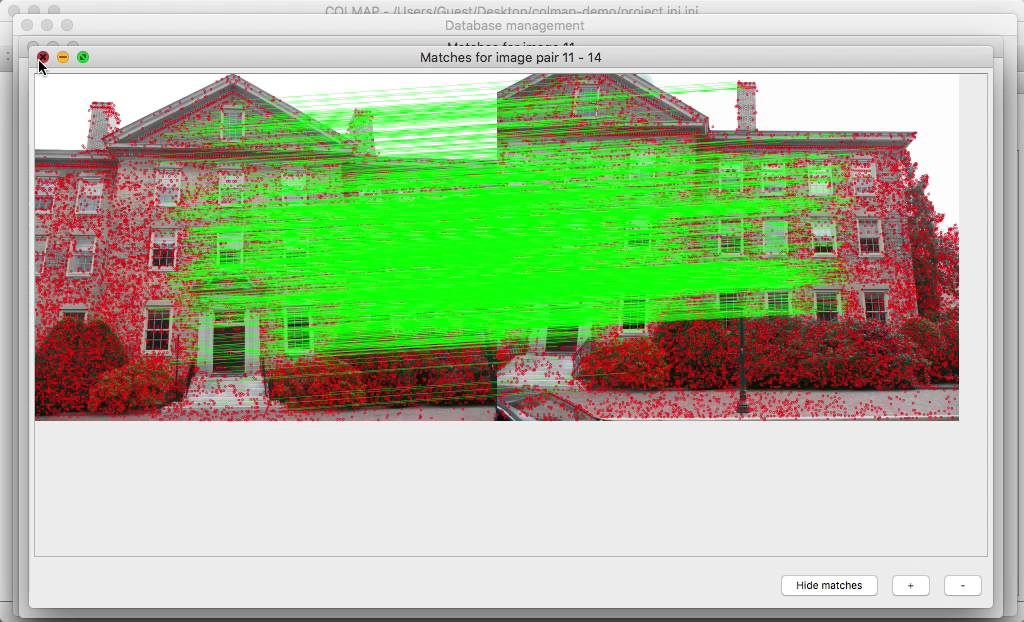
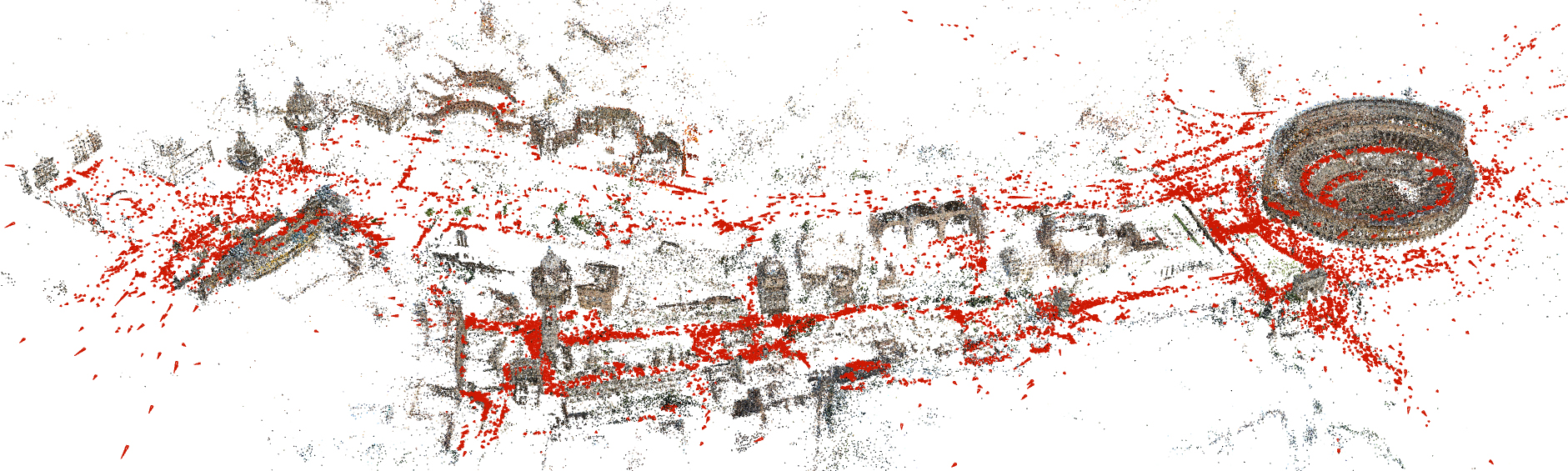
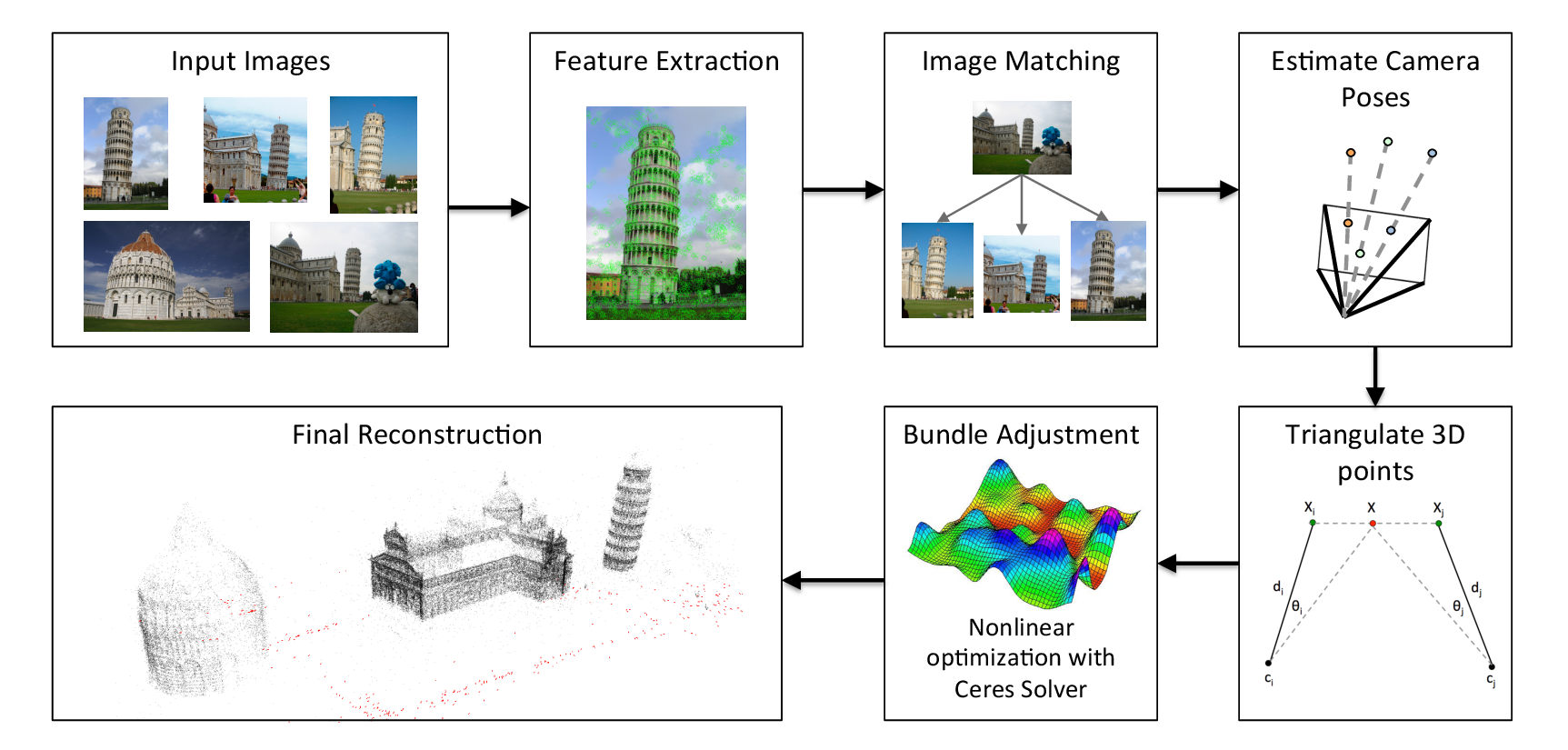
COLMAPは、GUIとCLIを備えた汎用的なStructure from Motion(SfM)とMulti-View Stereo(MVS)のパイプラインです。COLMAPは、順序のある画像、順序不同の画像群から再構築を行うための幅広い機能を提供します。
このソフトウェアはGNU General Publicライセンスです。
COLMAPはBSDライセンスに基づいてライセンスされています。このプロジェクトを研究で利用する場合は以下論文を引用してください。
GNU GPLライセンスとのことだけど、GPL v1ということだろうか。だとしたら商用利用可能だけど、ライブラリとして使用する場合は著作権の明記と、ソースコードの開示が必要。
後にBSDライセンスになったようです。
元となっているのはECCV 2016の”Pixelwise View Selection for Unstructured Multi-View Stereo“という論文。
ソースコードがGitHubで公開されているけど↓
https://github.com/colmap/colmap
ビルド済みバイナリの配布もある↓
https://demuc.de/colmap/
これを知った経緯としては、こちらの記事にコメントで教えていただいて↓
CVPR2017で発表されたHSfM(Hybrid Structure-from-Motion)という手法がTheiaに実装されたのを知り→TheiaSfM/src/theia/sfm/hybrid_reconstruction_estimator.h
そのHSfM(Hybrid Structure-from-Motion)の論文中でCOLMAPが引用されていたからなのです。
それぞれのライブラリ、ツールに実装されている手法の特性についてもうちょっと詳しく知るべきだよな。。。
関連記事
オープンソースの物理ベースGIレンダラ『appleseed』
WordPressの表示を高速化する
Amazon Web ServicesでWordPress
Adobeの手振れ補正機能『ワープスタビライザー』の秘密
ポイントクラウドコンソーシアム
Kornia:微分可能なコンピュータービジョンライブラリ
Russian3DScannerのトポロジー転送ツール『Wr...
プログラムによる景観の自動生成
書籍『OpenCV 3 プログラミングブック』を購入
iPadをハンディ3Dスキャナにするガジェット『iSense...
CGレンダラ研究開発のためのフレームワーク『Lightmet...
3D Gaussian Splatting:リアルタイム描画...
YOLO (You Only Look Once):ディープ...
Structure from Motion (多視点画像から...
VGGT:マルチビュー・フィードフォワード型3Dビジョン基盤...
KelpNet:C#で使える可読性重視のディープラーニングラ...
MeshLab:3Dオブジェクトの確認・変換に便利なフリーウ...
Qlone:スマホのカメラで3Dスキャンできるアプリ
UnityでLight Shaftを表現する
Pylearn2:ディープラーニングに対応したPythonの...
WordPressのサーバ引っ越し方法を考える
オープンソースの人体モデリングツール『MakeHuman』の...
UnityでPoint Cloudを表示する方法
Kinect for Windows v2の日本価格決定
PureRef:リファレンス画像専用ビューア
Mac用のSubversionクライアント 『SCplugi...
Paul Debevec
顔追跡による擬似3D表示『Dynamic Perspecti...
fSpy:1枚の写真からカメラパラメーターを割り出すツール
MFnDataとMFnAttribute
Manim:Pythonで使える数学アニメーションライブラリ
チャットツール用bot開発フレームワーク『Hubot』
DensePose:画像中の人物表面のUV座標を推定する
Google App Engine上のWordPressでA...
WordPress on Windows Azure
pythonもかじってみようかと
書籍『仕事ではじめる機械学習』を読みました
WinSCP
PyMC:Pythonのベイズ統計ライブラリ
Unityからkonashiをコントロールする
書籍『3次元コンピュータビジョン計算ハンドブック』を購入
コンピュータビジョンの技術マップ
コメント