GoogleがSLAM(Simultaneous Localization and Mapping)のオープンソースライブラリCartographerを発表した。
Apache(v2)ライセンスなので、ライセンスと著作権、変更点を表示すれば商用利用もできる。
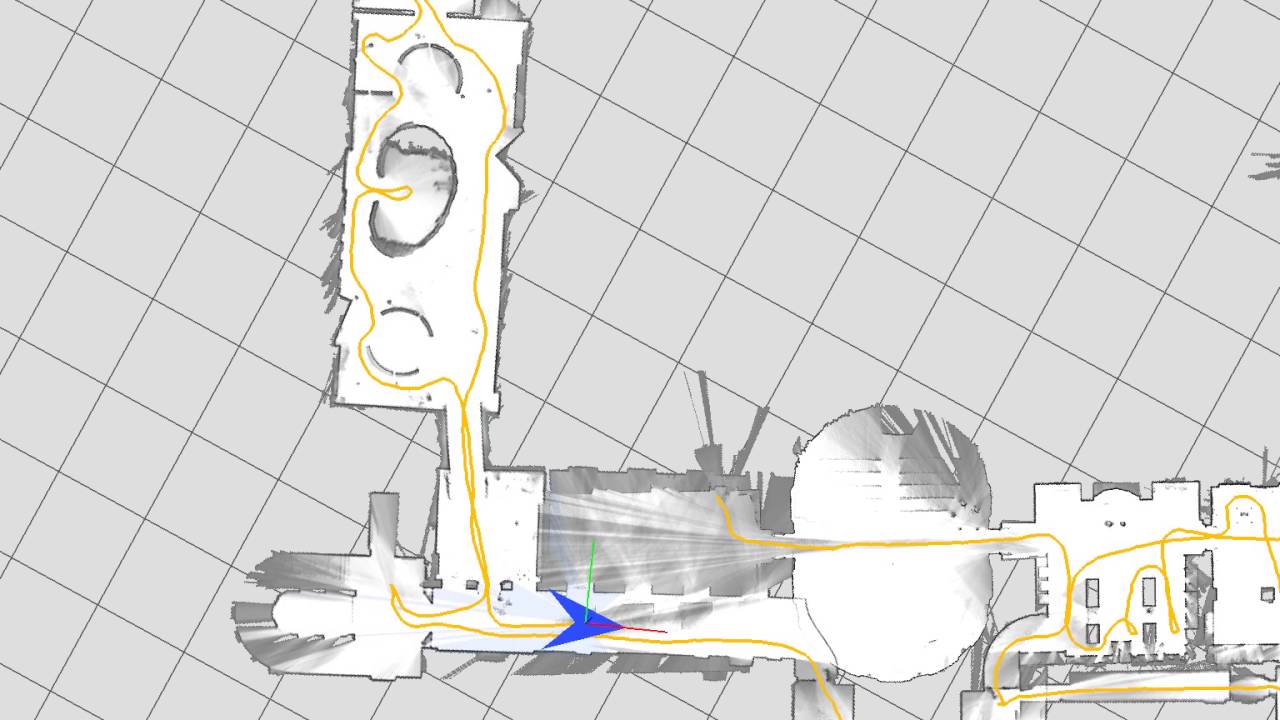
Cartographer
Cartographerは、リアルタイムの自己位置推定と、複数プラットフォーム・センサー間での2Dと3Dマッピング(SLAM)を提供するシステムです。
http://shiropen.com/2016/10/06/20203
SLAM(Simultaneous Localization and Mapping)ってのは、日本語で言うと「自己位置推定と環境地図作成」ですかね。
ソースコードはGitHub上にあり、ドキュメントはこちらにある。↓
https://google-cartographer.readthedocs.io/
推奨動作環境
Cartographerは他の環境でも動作しますが、以下の構成での動作を確認しております:
- 64-bit, modern CPU (例:core i7 第3世代)
- 16 GB RAM
- Ubuntu 14.04 (Trusty)
- gcc version 4.8.4
ROS(Robot Operating System)用のAPIも用意されており、有名なToyota HSR、TurtleBotsについてはもう対応したコードが公開されているようだ。↓
Cartographerの3D SLAMのデモ動画↓
Qiitaに失敗談だけは上がっている(笑)
http://qiita.com/syoamakase/items/ea3ad5040cd53507ca5e
ROS自体もマルチプラットフォーム対応のバージョン2.0の準備が進んでますが、これからロボット制御ソフトウェアの開発はどんどんお手軽になっていくんですかね。
https://github.com/ros2
関連記事
R-CNN (Regions with CNN featur...
BlenderProc:Blenderで機械学習用の画像デー...
Raspberry Piでセンサーの常時稼働を検討する
ディープラーニング
Verilog HDL
NumSharp:C#で使えるNumPyライクな数値計算ライ...
Google製オープンソース機械学習ライブラリ『Tensor...
SDカードサイズのコンピューター『Intel Edison』
GoogleのDeep Learning論文
Mechanizeで要認証Webサイトをスクレイピング
DCGAN (Deep Convolutional GAN)...
LuxCoreRender:オープンソースの物理ベースレンダ...
ZBrushのZScript入門
iPhone x ロボットハッカソン~RomoのiPhone...
Mask R-CNN:ディープラーニングによる一般物体検出・...
Polyscope:3Dデータ操作用GUIライブラリ
ROSの薄い本
CGのためのディープラーニング
OpenCVのバージョン3が正式リリースされたぞ
SSII 2014 デモンストレーションセッションのダイジェ...
CNN Explainer:畳み込みニューラルネットワーク可...
OpenMesh:オープンソースの3Dメッシュデータライブラ...
Webサイトのワイヤーフレームが作成できるオンラインツール
Unity ARKitプラグインサンプルのドキュメントを読む
AMIMOTO(PVM版)で作成したインスタンスをAMIMO...
NeRF (Neural Radiance Fields):...
iOSデバイスのためのフィジカル・コンピューティングツールキ...
CGAN (Conditional GAN):条件付き敵対的...
Adobeの手振れ補正機能『ワープスタビライザー』の秘密
OpenAR:OpenCVベースのマーカーARライブラリ
Unity Scriptコーディング→Unreal Engi...
3D Gaussian Splatting:リアルタイム描画...
オープンソースの顔の動作解析ツールキット『OpenFace』
Unityで学ぶC#
オープンソースの顔認識フレームワーク『OpenBR』
UnityのGameObjectの向きをScriptで制御す...
Pythonのソースコードに特化した検索エンジン『Nulle...
Amazon EC2ログイン用の秘密鍵を無くした場合の対処方...
3Dスキャンに基づくプロシージャルフェイシャルアニメーション
オープンソースの物理ベースGIレンダラ『appleseed』
Netron:機械学習モデルを可視化するツール
OpenGVの用語


コメント