FCN, SegNetに引き続きディープラーニングによるSemantic Segmentation手法のお勉強。

次はU-Netについて。
U-Net
U-Netは、MICCAI (Medical Image Computing and Computer-Assisted Intervention) 2015で発表されたU-Net: Convolutional Networks for Biomedical Image Segmentationで提案されたSemantic Segmentation手法。(学会に採択されたタイミングで言うとSegNetよりも先ということか?)
学会名や論文タイトルからも分かる通り、医用画像のSegmentationを目的とした研究です。(例にHeLa細胞の画像とかが出てくる)
U-Netは2015年の ISBI (IEEE International Symposium on Biomedical Imaging)でDental X-Ray Image Segmentation ChallengeとCell Tracking Challengeの2部門で優勝している。
著者による概要動画も公開されている↓
U-Netのネットワーク構造
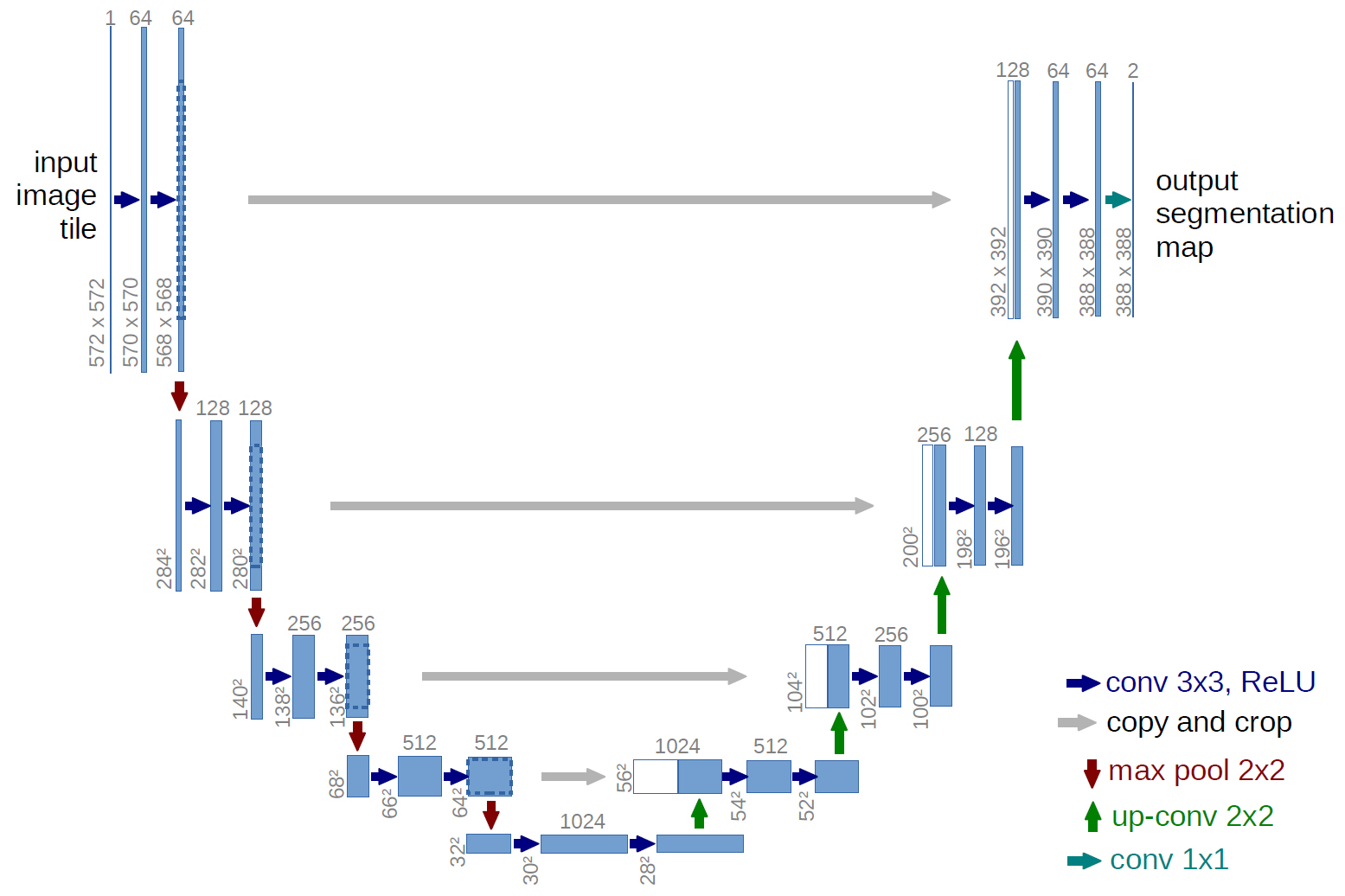
以下がU-Netのネットワーク図。ネットワーク構造がU字に見えるからU-Netと呼ぶらしい↓
青ボックス:画像、特徴マップ
白ボックス:コピーされた特徴マップ
ボックスの上の数字:チャンネル数
ボックスの左下の数字:縦横のサイズ青矢印:kernel size 3×3, padding0の畳み込み、ReLU
グレー矢印:特徴マップのコピーをクロップ
赤矢印:kernel size 2×2のmax-pooling
緑矢印:kernel size 2×2、stride2の逆畳み込み
青緑矢印:kernel size 1×1の畳み込み
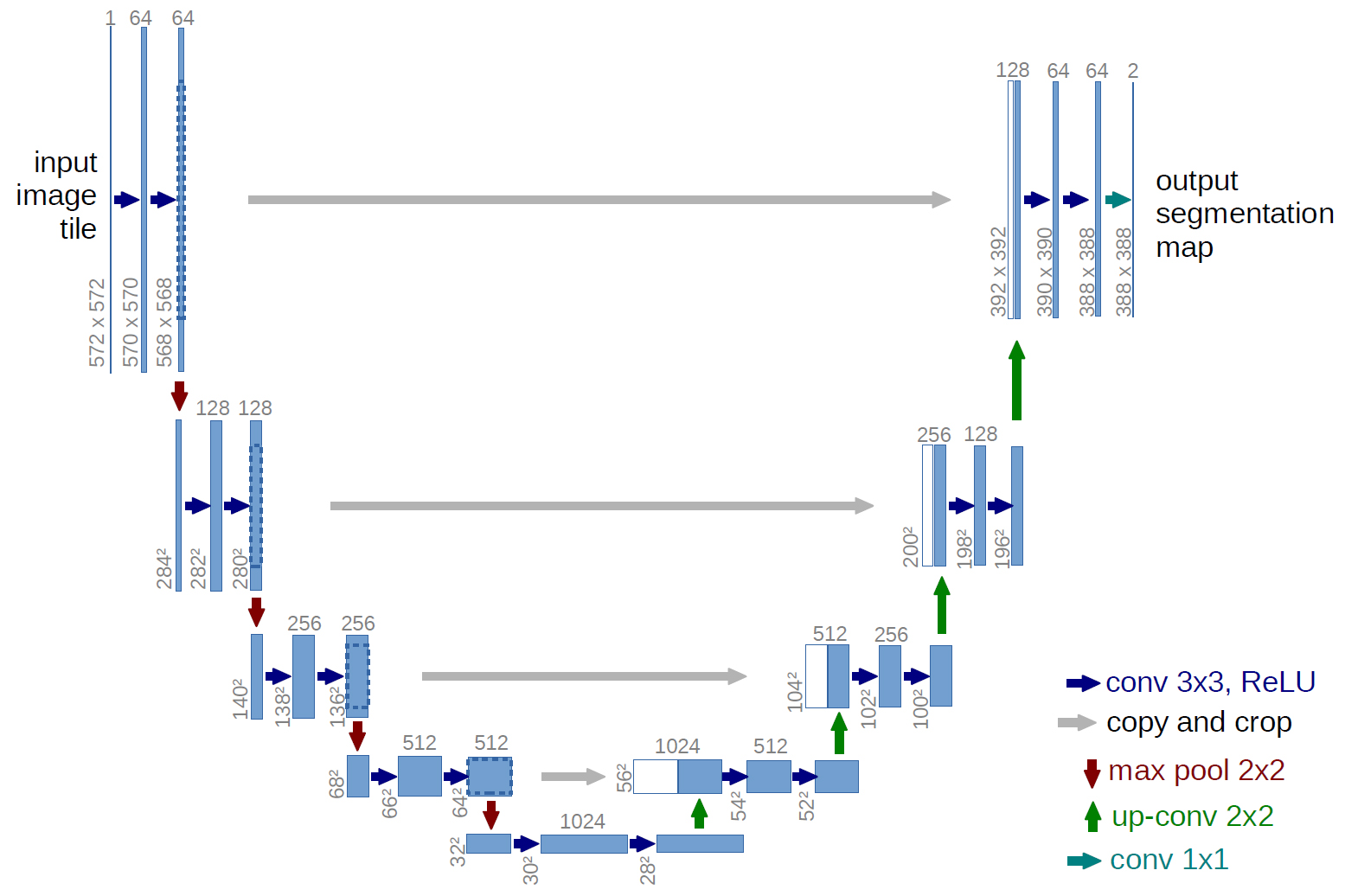
※このネットワーク図では具体例として入力画像と特徴マップのサイズも記載されているが、U-Netは全結合層を持たないため、入力画像サイズを固定する必要はない。
この論文では細胞と背景のセグメンテーションが目的なので出力は2チャンネル(2クラス分類)。
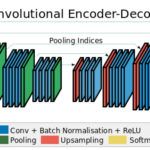
Encoder-Decoder構造
U-NetもFCNやSegNetと同様に全結合層を持たず、畳み込み層で構成されている。U-NetもSegNetのようにほぼ左右対称のEncoder–Decoder構造で、Encoderのpoolingを経てダウンサンプリングされた特徴マップをDecoderでアップサンプリングしていく。
U-NetとSegNetの大きな違いは、Encoderの各層で出力される特徴マップをDecoderの対応する各層の特徴マップに連結(concatenation)するアプローチを導入した点。このアプローチはスキップ接続と呼ばれているみたいですね。
Encoderの構造はVGGの特徴抽出層とほぼ同様だが、畳み込み時のpaddingが0なため、畳み込み後は特徴マップのサイズは少しだけ小さくなる。(実装ではpaddingしているU-Netも見かけるけど…)
スキップ接続
SegNetでは、EncoderとDecoderが直列に接続されていたため、特徴が伝搬する過程でpixelディティールが失われてしまい、元の画像に対してSegmentation結果が粗くなりやすい欠点があった。
U-Netでは、Encoderの各層で出力される特徴マップを、Decoderの対応する層の特徴マップに直接連結することでpixelのディティールを補っている。
前の層の特徴マップと統合するという点ではFCNのアプローチにも似ているが、FCNでは違う層の特徴マップ同士をチャンネルごとの値の足し算で統合しているのに対し、U-NetではEncoderで出力された特徴マップを別チャンネルとしてDecoderの特徴マップに追加する形で連結している。
Encoderではpadding=0の畳み込みを行って特徴マップが少しずつ小さくなっているため、Decoderで2倍にアップサンプリング(逆畳み込み)してもEncoderの特徴マップとサイズが合わない。
そのため、Encoderの特徴マップの中央部分を切り出し(crop)してDecoderの特徴マップとサイズを一致させて連結している。
※Encoderでpaddingを行えばEncoderとDecoderの特徴マップのサイズが一致するのでそのまま連結することができる。(そういう実装例もある)
論文では電子顕微鏡で撮影された細胞の画像を細胞と背景に分割する2クラスの分類が行われている。また、少ないデータセットで学習するためのData Augmentation方法についても記載されていた。
U-Netはその後改良版のU-Net++というのも発表された。
https://github.com/MrGiovanni/UNetPlusPlus
物体検出のネットワークだと矩形の出力とかで実装が複雑になりがちだけど、畳み込み層のみで構成されたネットワークはそのまま画像が出力される分構造がシンプルで理解しやすい気がする。(学習に委ねる範囲が多いということでもあるのか?)
U-NetはPix2PixのGeneratorのネットワークにも使用されている。
以前線画の自動着色で話題になったPreferred NetworksのPaintsChainerのGeneratorネットワークに使用されているのもU-Net。
https://qiita.com/taizan/items/cf77fd37ec3a0bef5d9d
https://qiita.com/taizan/items/7119e16064cc11500f32
サンプルコード
例のごとくPyTorchの実装を探す。やっぱりpaddingしてるよなぁ。
https://github.com/hszhao/PSPNet
前も言ったけど、U-Netに限らずSemantic Segmentation系のPyTorch実装をひとまとめにしたリポジトリもある↓
https://github.com/meetshah1995/pytorch-semseg
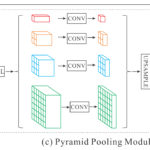
次はPSPNetについて勉強するかな。

関連記事
OpenMVS:Multi-View Stereoによる3次...
YOLO (You Only Look Once):ディープ...
Multi-View Environment:複数画像から3...
Composition Rendering:Blenderに...
MVStudio:オープンソースのPhotogrammetr...
OpenAR:OpenCVベースのマーカーARライブラリ
PyTorch3D:3Dコンピュータービジョンライブラリ
CGAN (Conditional GAN):条件付き敵対的...
represent
SSD (Single Shot Multibox Dete...
OpenGVの用語
画像生成AI Stable Diffusionで遊ぶ
「ベンジャミン·バトン数奇な人生」でどうやってCGの顔を作っ...
MLDemos:機械学習について理解するための可視化ツール
機械学習に役立つPythonライブラリ一覧
viser:Pythonで使える3D可視化ライブラリ
第25回コンピュータビジョン勉強会@関東に行って来た
Accord.NET Framework:C#で使える機械学...
BGSLibrary:OpenCVベースの背景差分ライブラリ
NeRF (Neural Radiance Fields):...
疑似3D写真が撮れるiPhoneアプリ『Seene』がアップ...
Mask R-CNN:ディープラーニングによる一般物体検出・...
AI英語教材アプリ『abceed』
ニューラルネットワークで画像分類
C#で使える遺伝的アルゴリズムライブラリ『GeneticSh...
写真に3Dオブジェクトを違和感無く合成する『3DPhotoM...
WordPressで数式を扱う
Adobeの手振れ補正機能『ワープスタビライザー』の秘密
BlenderProc:Blenderで機械学習用の画像デー...
Paul Debevec
Mitsuba 2:オープンソースの物理ベースレンダラ
pythonの機械学習ライブラリ『scikit-learn』
NumSharp:C#で使えるNumPyライクな数値計算ライ...
3Dスキャンに基づくプロシージャルフェイシャルアニメーション
3D復元技術の情報リンク集
畳み込みニューラルネットワーク (CNN: Convolut...
PyDataTokyo主催のDeep Learning勉強会
機械学習手法『Random Forest』
OpenCV バージョン4がリリースされた!
Point Cloud Libraryに動画フォーマットが追...
顔追跡による擬似3D表示『Dynamic Perspecti...
OpenCV 3.1とopencv_contribモジュール...
コメント