数度のトライを経て、OpenCVのバージョン3.3.0でやっとsfmモジュールのビルドが通ったわけです。
ようやくサンプルを試す段階に来た。参考にしてるQiita記事の後編へやっと進める。↓
http://qiita.com/ChaoticActivity/items/178d23508b92a09e59ea
記事によると、サンプルを動かすためにまたいくつか手を加える必要がある(笑)
ヘッダーファイルの修正
さて、opencv_contrib-3.3.0/modules/sfm/samples以下にあるsfmのサンプルをそのままビルドしようとすると
reconstruct()が定義されていません
的なエラーが出る。
このエラーの理由は、いくつかのヘッダーファイルで
#if CERES_FOUND
という条件マクロが書かれており、Ceres-Solverの有無でincludeするファイルを選択しているから。なので、この条件がtrueになるようにコンパイラにCeres-Solverが存在することを知らせる必要がある。
で、ちょっと行儀が悪いけど、オイラはもうinclude/opencv2/sfm.hppの冒頭の以下の記述を
#ifndef __OPENCV_SFM_HPP__ #define __OPENCV_SFM_HPP__ #include <opencv2/sfm/conditioning.hpp> #include <opencv2/sfm/fundamental.hpp> #include <opencv2/sfm/numeric.hpp> #include <opencv2/sfm/projection.hpp> #include <opencv2/sfm/triangulation.hpp> #if CERES_FOUND #include <opencv2/sfm/reconstruct.hpp> #include <opencv2/sfm/simple_pipeline.hpp> #endif
直接以下のように編集しちゃいました。
#ifndef __OPENCV_SFM_HPP__ #define __OPENCV_SFM_HPP__ #include#include #include #include #include #include #define CERES_FOUND 1 #if CERES_FOUND #include #include #endif
サンプルコードの実行
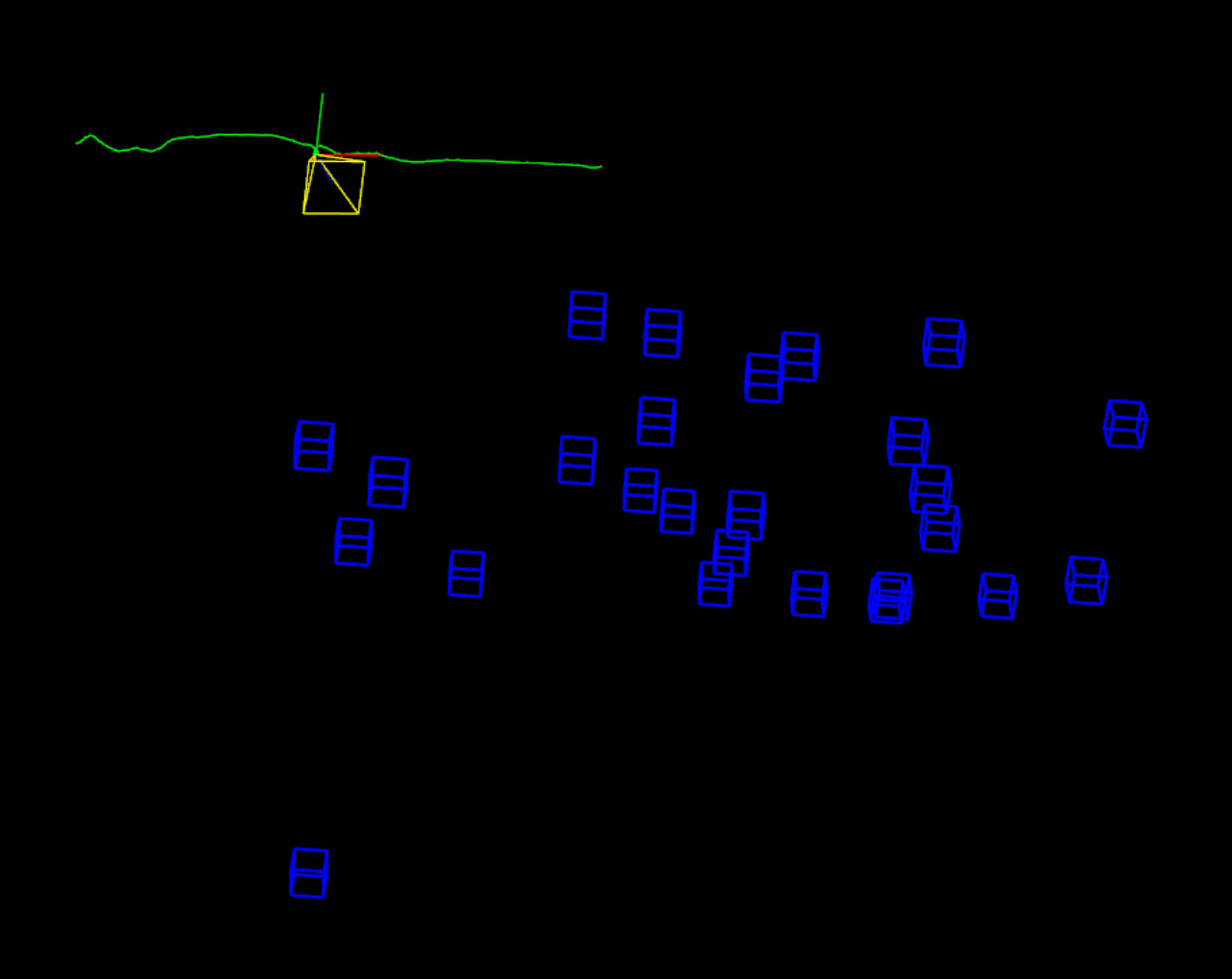
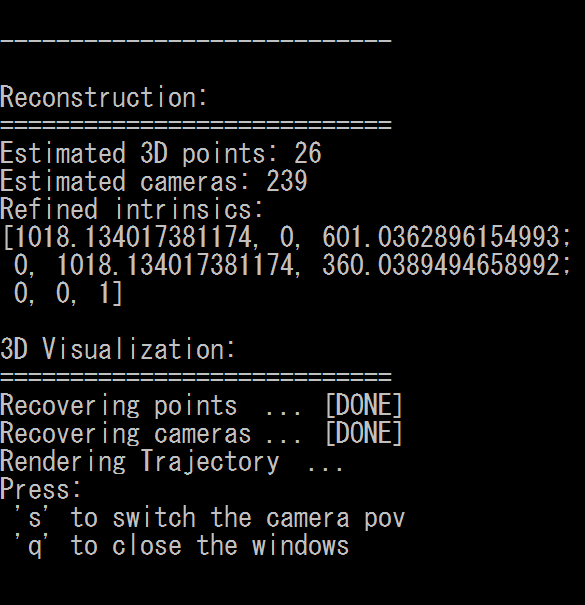
参考記事に倣ってtrajectory_reconstruccion.cppを実行してみる。
おお、特にエラーも無く動作したぞ!
サンプルコードのバグ修正
参考記事によると、このサンプルコードにはバグがあるというか、カメラの軌跡を表示する際に使用しているcv::viz::WTrajectoryに渡す引数が間違っているらしい。
以下の部分を
/// Recovering cameras
cout << "Recovering cameras ... ";
vector<Affine3d> path_est;
for (size_t i = 0; i < Rs_est.size(); ++i)
path_est.push_back(Affine3d(Rs_est[i],ts_est[i]));
cout << "[DONE]" << endl;
逆行列に変えて以下のようにすると正しい座標変換になる。
/// Recovering cameras
cout << "Recovering cameras ... ";
vector<Affine3d> path_est;
for (size_t i = 0; i < Rs_est.size(); ++i)
path_est.push_back(Affine3d(Rs_est[i], ts_est[i]).inv());
cout << "[DONE]" << endl;
別のサンプルコード
調子に乗ってscene_reconstruction.cppも動かしてみようと思ったら見事エラー…
http://docs.opencv.org/3.3.0/d4/d18/tutorial_sfm_scene_reconstruction.html
え、正しいコマンドライン引数が良く分からんぞ。。。
関連記事
ArUco:OpenCVベースのコンパクトなARライブラリ
OpenAR:OpenCVベースのマーカーARライブラリ
畳み込みニューラルネットワーク (CNN: Convolut...
CycleGAN:ドメイン関係を学習した画像変換
網元AMIで作ったWordpressサイトのインスタンスをt...
Facebookの顔認証技術『DeepFace』
Pylearn2:ディープラーニングに対応したPythonの...
機械学習のオープンソースソフトウェアフォーラム『mloss(...
Cartographer:オープンソースのSLAMライブラリ
書籍『3次元コンピュータビジョン計算ハンドブック』を購入
Math Inspector:科学計算向けビジュアルプログラ...
Unityで強化学習できる『Unity ML-Agents』
FacebookがDeep learningツールの一部をオ...
Active Appearance Models(AAM)
1枚の画像からマテリアルを作成できる無料ツール『Materi...
Raspberry PiでIoTごっこ
オープンソースのロボットアプリケーションフレームワーク『RO...
ROMOハッカソンに行ってきた
Google XML Sitemap Generatorプラ...
IronPythonを使ってUnity上でPythonのコー...
PythonでMayaのShapeノードプラグインを作る
OANDAのfxTrade API
コンピュータビジョンの技術マップ
GeoGebra:無料で使える数学アプリ
海外ドラマのChromaKey
UnityでLight Shaftを表現する
VGGT:マルチビュー・フィードフォワード型3Dビジョン基盤...
立体視を試してみた
Adobe MAX 2015
今年もSSII
PythonでBlenderのAdd-on開発
Google製オープンソース機械学習ライブラリ『Tensor...
OpenGVのライブラリ構成
PGGAN:段階的に解像度を上げて学習を進めるGAN
OpenCV バージョン4がリリースされた!
動的なメモリの扱い
NumSharp:C#で使えるNumPyライクな数値計算ライ...
trimesh:PythonでポリゴンMeshを扱うライブラ...
Blendify:コンピュータービジョン向けBlenderラ...
fSpy:1枚の写真からカメラパラメーターを割り出すツール
Live CV:インタラクティブにComputer Visi...
Web経由でRaspberry PiのGPIOを操作したい


コメント